Overview
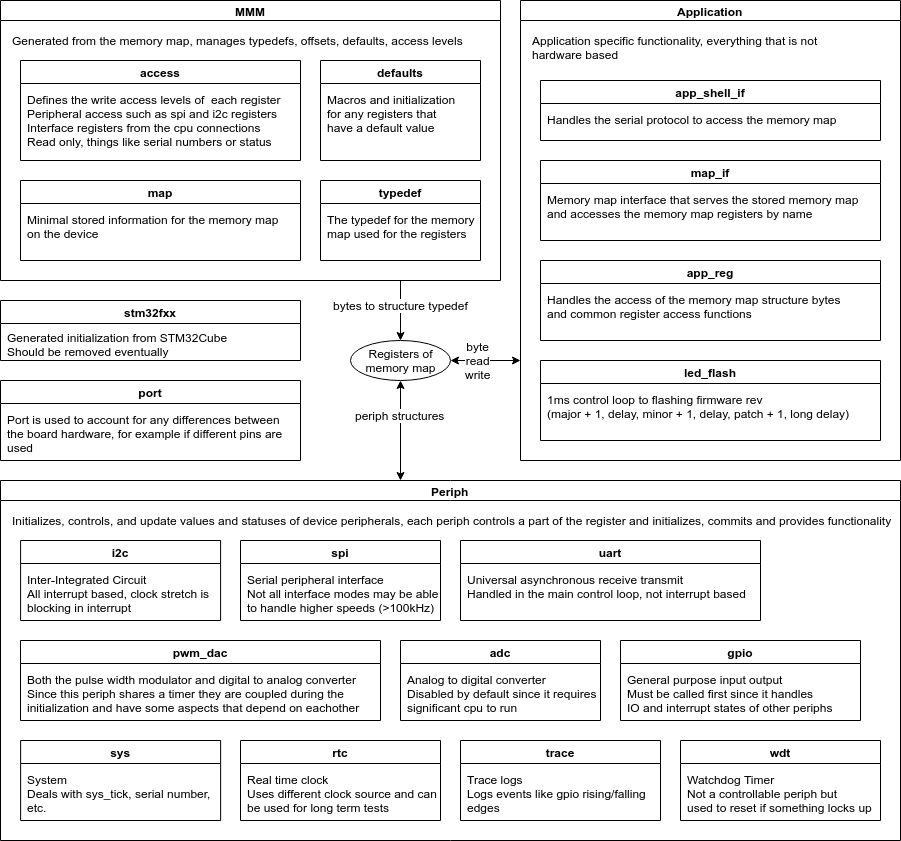
PHiLIP firmware is designed to easily add peripheral functionality. It separates out the peripherals from the communication and application logic and the memory map. More information on firmware design is available in the doxygen docs
PHiLIP Serial Protocol
The communication medium for PHiLIP is a serial connection.It provides basic instructions that allows for extensibility from other interfaces or basic communication.
Replies are given in standard json format with a "result" that corresponds to a errno code and "data" if data is present.
For example reading bytes from a register would respond with {"data":[0,1,2,3,4,5,6,7,8,9], "result":0}
| Name | Command | Description | Example | Example Description |
|---|---|---|---|---|
| READ_REG_CMD | rr <index> <size_of_bytes> |
Read application registers | rr 0 10 |
Reads 10 bytes starting at register 0 |
| WRITE_REG_CMD | wr <index> [data0 ... datan] |
Write application registers | wr 10 99 88 77 |
Writes 99, 88 and 77 starting at register 10 |
| EXECUTE_CMD | ex |
Execute and commit changes in the registers | ||
| RESET_CMD | mcu_rst |
Provide a software reset to PHiLIP | ||
| VERSION_CMD | -v |
Prints the version of the interface | ||
| HELP_CMD | help |
Prints a help menu | ||
| MEMORY_MAP_CMD | mm <record_index> |
Gives properties of the memory map for a given index | mm 0 |
Gives the properties of the first entry of the memory map |
| MM_SIZE_CMD | mm_size |
Gives the amount of records in the memory map | ||
| READ_KEY_CMD | r <reg_name> [array_index] |
Reads values given a record name | r user_reg 2 |
Reads the 3rd value of the user_reg |
| WRITE_KEY_CMD | w <reg_name> <data> |
Writes a value to a record name | w i2c.mode.init 0 |
Writes 0 to the i2c mode bit causing it to reinitialize the next ex command |
Building Firmware from Sources
PHiLIP was developed in the EclipseIDE but can be build with make. To build simple call BOARD=BLUEPILL make or BOARD=NUCLEOF103RB make in the FW directory.
Build Requirements
The following are the conditions to provide the build.
| Application | Version |
|---|---|
| EclipseIDE | Neon.3 Release (4.6.3) |
| ST System Workbench | sw4stm32_linux_64bits-c2.4 |
| OS | Ubuntu 16.04 |
| Compiler | gcc version 7.2.1 20170904 (release) [ARM/embedded-7-branch revision 255204] (GNU Tools for Arm Embedded Processors 7-2017-q4-major) |
| Assembler | GNU assembler version 2.29.51 (arm-none-eabi) using BFD version (GNU Tools for Arm Embedded Processors 7-2017-q4-major) 2.29.51.20171128 |
| Linker | GNU ld (GNU Tools for Arm Embedded Processors 7-2017-q4-major) 2.29.51.20171128 |
| memory-map-manager | 0.0.9 |
| STM32Cube V1.0 | 4.26.0 |
| STM32Cube FW_F1 | V1.6.1 |
Setup of PHiLIP Environment
The setup will explain how to flash PHiLIP and install the python interface. To setup the PHiLIP environment some hardware will be required, either a nucleo-f103rb or a bluepill with a usb to uart converter.
1. Connect PHiLIP pins
For the nucleo-f103rb only the usb connection is required.
The bluepill will require a uart connection to A9 - IF_TX to the uart RX pin and the A10 - IF_RX to the uart TX pin.
See the PHiLIP-b pinout for more information.
The uart is needed for the basic interface but can also be used for ROM UART flashing.
To flash the bluepill with SWD, connect the swd pins and reset R - NRST pin.
{kind=link}
2. Flash PHiLIP to the device
The qualified firmware for PHiLIP is stored in the PHiLIP Releases. The correct firmware is needed for the given board, either the PHiLIP_BLUEPILL or the PHiLIP_NUCLEO-F103RB. To flash the firmware on the nucleo-f103rb, drag and drop the .bin file to the nucleo device. There are many ways to flash the bluepill, either by connecting a swd connector or with the ROM UART bootloader. After flashing PHiLIP should be blinking the firmware revision pattern (1 + the firmware number, so firmware revision 1.0.3 would blink 2, 1, 4 times).
HINT: If flashing a nucleo-f103rb with a ubuntu machine use the following command
wget -P /media/${USER}/NODE_F103RB/ https://github.com/riot-appstore/PHiLIP/releases/download/v1.0.2/PHiLIP-NUCLEO-F103RB.bin